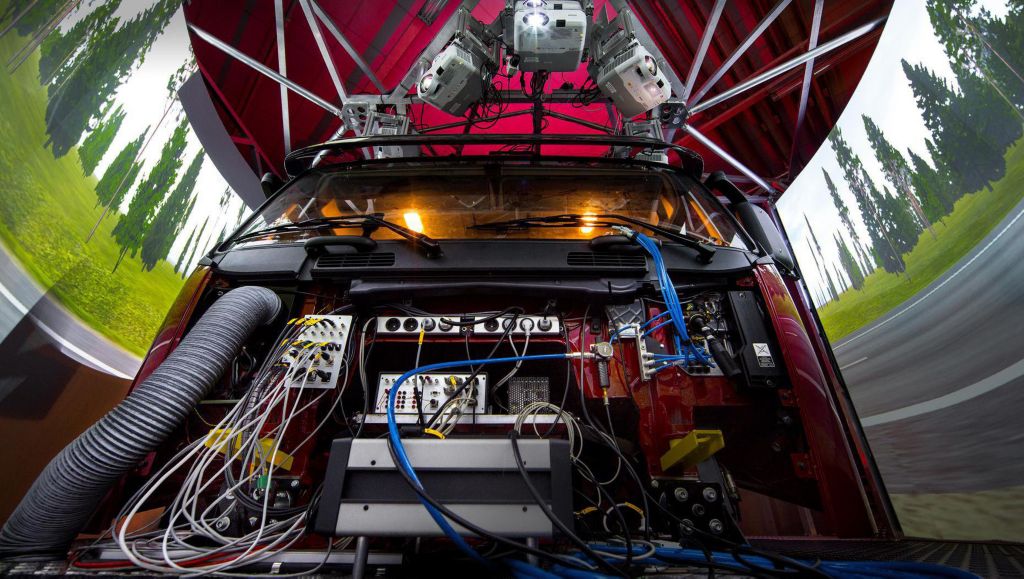
Hän istuu valvontahuoneessa, jossa lukuisat tietokoneet kirjaavat muistiin kaiken tiedon siitä, kuinka testikuljettaja ajaa, mitä hän seuraa ja kuinka hän sijoittautuu tiellä. Tietoja kerätään valtavasti. Tämä ajosimulaattori on varsin uudenlaista testitekniikkaa. Eräs sen tärkeimmistä eduista on se, kuinka kuljettaja voidaan nyt ottaa hyvin varhaisessa vaiheessa mukaan tuotekehitystyöhön.
– Tiet, ajoneuvot ja turvallisuusjärjestelmät on perinteisesti jouduttu rakentamaan ensin, ja vasta sitten on voitu testata, toimivatko ne käytännössä. Nyt eri vaiheita voidaan kuitenkin toteuttaa samanaikaisesti, Kristoffer Tagesson kertoo.
Ajosimulaattorin avulla voimme siis testata uusia ajoneuvoja niiden tulevissa ajoympäristöissä jo ajoneuvojen kehittämisvaiheessa. Peter Nilsson, joka myös tekee väitöskirjaa teollisesta suunnittelusta Volvo Trucksilla, on mukana juuri tällaisessa projektissa.
– Ajoneuvon ja infrastruktuurin kehittämistyössä katsotaan kauas tulevaisuuteen. Simulaattorin avulla voimme visualisoida lähes kaikki tieolosuhteet, joten kehitystyö voidaan optimoida yhtäaikaisesti molemmilla osa-alueilla, hän kertoo.
Peter Nilssonin projektin nimi on Turvalliset väylät, ja siinä pyritään löytämään turvallisia kulkuväyliä pitkille, 27–34 metrin ajoneuvoyhdistelmille.
– Olen vakuuttunut siitä, että tällaiset pitkät ajoneuvoyhdistelmät otetaan yleiseen käyttöön vuosien 2020–2030 välillä, sillä ne ovat ympäristön kannalta tehokkaita vaihtoehtoja. Ensin meidän on kuitenkin löydettävä keinot helpottaa tällaisten yhdistelmien ajamista, sillä näin suurten perävaunujen tarkan sijainnin hahmottaminen on todella haastavaa, Peter Nilsson kertoo.